|
 
Biped Walking Robot
The study of artificial arms and hands began in 1967 incorporating the technological assets gained from developing the active prostheses started three years before. The studies had at first aimed only to develop machines to perform manual labor in lieu of persons and emphasized development of artificial hand mechanisms. Recently the aim has been to develop robots which can perform intelligent work as well as manual labor.
|
 WAM-1 (1967)
WAM-1 (1967)
|
|
Lower Limb Model: WL-1 (1966~1967)
The artificial lower-limb WL-1 was constructed on the basis of analysis
of locomotion of lower limbs. It resulted in the creation of the fundamental
functions of biped locomotion. |
|
WL-3
(1969)
|
|
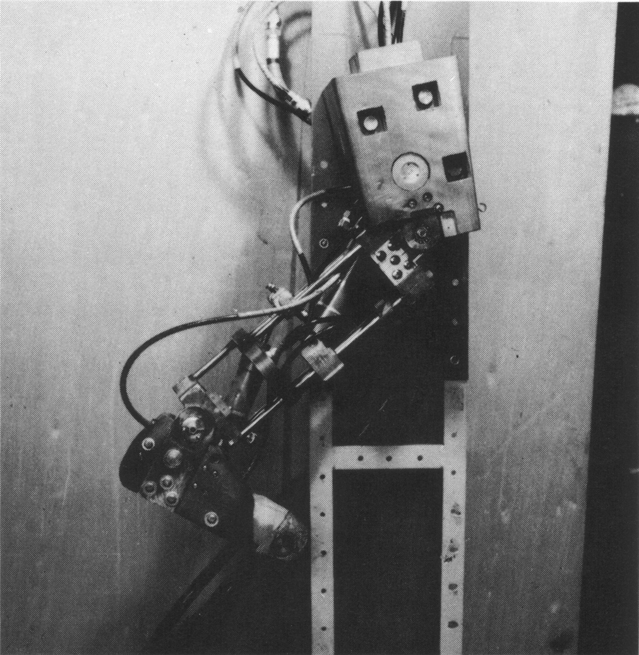
Master/Slave-Type Walking Machine:
WL-3 (1968~1969)
The mechanical model of lower limbs, the WL-3, which had an electro-hydraulic
servo-actuator and was controlled by using a master-slave method,
was constructed. It managed human-like movement in a swing phase and
a stance phase. It was also able to stand up and sit down. |
|
WAP-1 (1969)
|
|
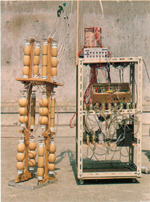
Introduction of
Artificial Muscle Made of Rubber: WAP-1 (1969)
The anthropomorphic pneumatically-activated pedipulator WAP-1 was
developed. In it, artificial muscles made of rubber were attached
as actuators. Planar biped locomotion was realized by teaching-playback
control of its artificial muscles.
|
|
 WAP-2 (1970)
WAP-2 (1970)
|
|
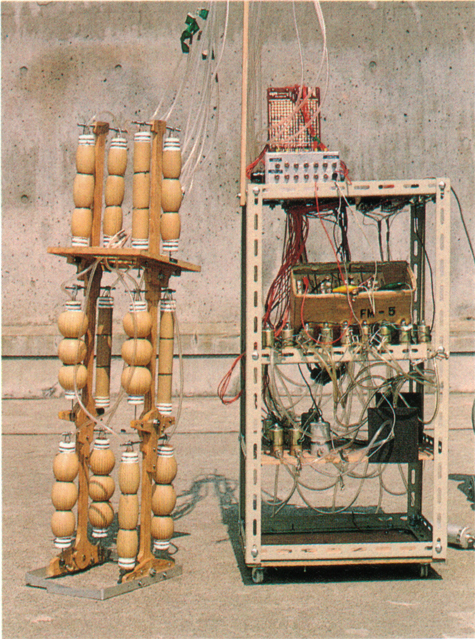
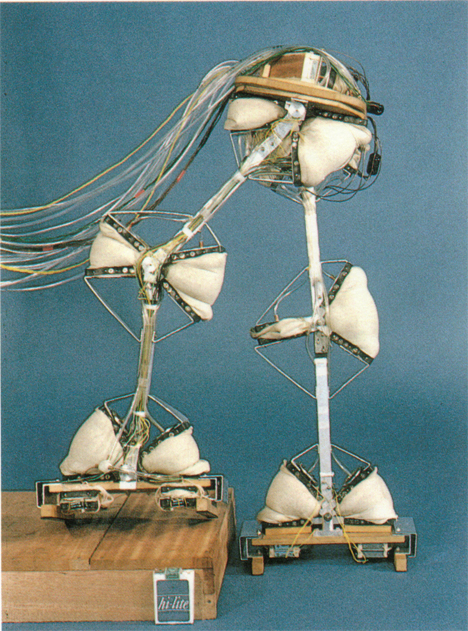
Introduction of
the Pouch-Type Artificial Muscle: WAP-2(1970)
In the second mode, the WAP-2, the powerful pouch-type artificial
muscles were used as actuators. Automatic posture control was obtained
by implanting pressure sensors under the soles.
|
|
 WAP-3 (1971)
WAP-3 (1971)
|
|
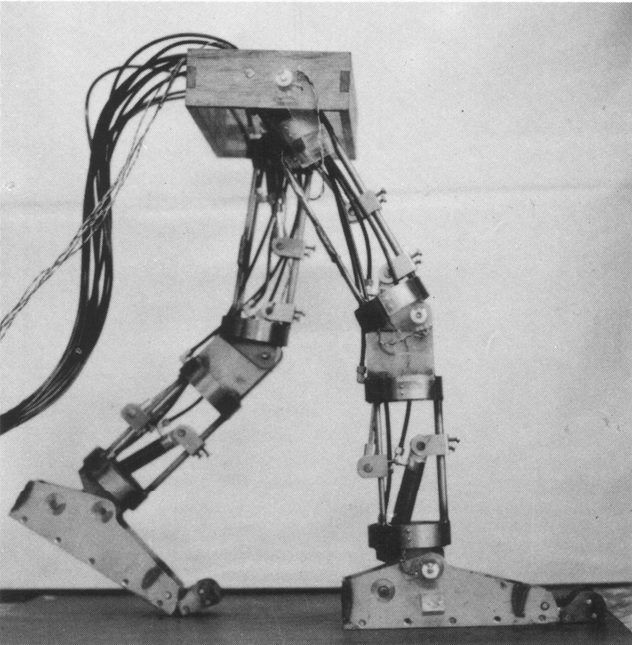
Realization of Biped
Walking by Light Weigh Model: WAP-3 (1971)
The WAP-3, a refined model of the WAP-2, was able to move its center
of gravity on the frontal plane so that it was able to not only
walk on a flat surface but also descend and ascend a staircase or
slope and turn while walking. A controller based on memory directed
the WAP-3, and its actuator was driven by PWM. The three-dimensional
automatic biped walking realized by the WAP-3 was the first in the
world.
|
|
WL-5 (1971)
|
|
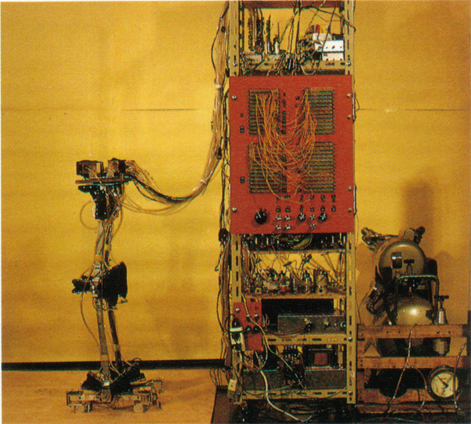
Realization of Static
Walking by a Heavy Model: WL-5 (1970~1972)
The minicomputer controlled model WL-5 was developed. It had a
laterally bendable body through which it could move its center of
gravity on a frontal plane. Automatic biped walking and the ability
to change the direction it was walking in were made possible through
the use of a mini computer. The WL-5 was used as the lower limbs
of the WABOT-1 (45sec/step)
|
|
 WL-9DR (1980)
WL-9DR (1980)
|
|
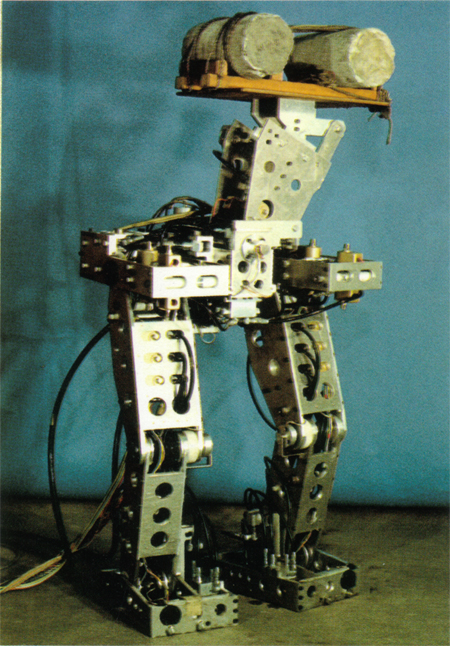
Realization of Quasi-Dynamic
Walking: WL-9DR (1979~1980)
Quasi-dynamic walking was realized for the first time in the world
by the model WL-9DR that used a 16bit microcomputer as its controller
instead of a minicomputer, enabling versatile control. The number
of points the WL-9DR's sole touched the floor was increased from
three to four. This, in turn, made the mathematical solution of
a particular walking pattern much more easily attainable (10sec/step).
|
|
 WL-10R (1983)
WL-10R (1983)
|
|
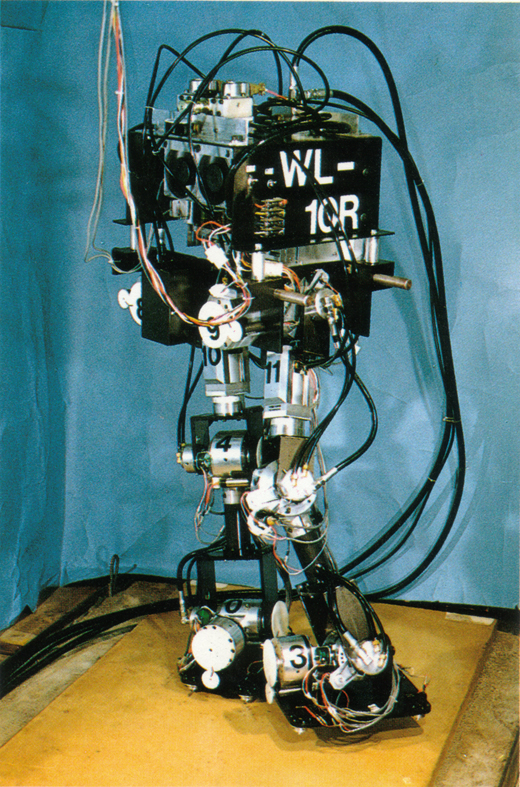
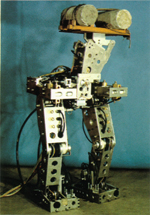
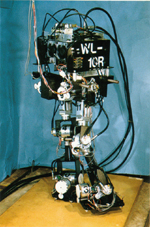
Realization of Plane
Walking: WL-10, 10R (1982~1983)
The model WL-10R, a refined type of WL-10, was constructed, in
which the rotaries type servo-actuator (RSA) was introduced and
carbon fiber reinforced plastic (CFRP) was used in its structural
parts. The WL-10R added one more degree of freedom at the yaw axis
of the hip joint. Consequently the WL-10R acquired the function
of walking laterally, turning and walking forward and also backward,
which are called plane walking (4.4sec/step).
|
|
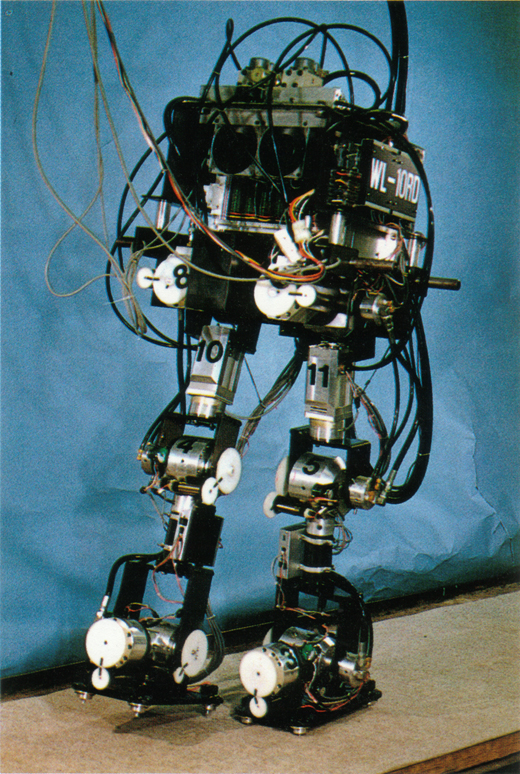
 WL-10RD (1984)
WL-10RD (1984)
|
|
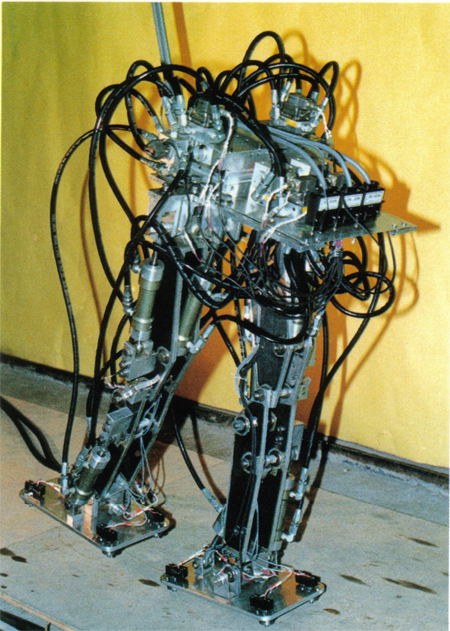
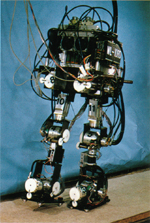
Realization of Dynamic
Walking: WL-10RD (1984)
In the model WL-10RD, a refined WL-10R, torque sensors were attached
to the ankle and the hip joint to allow flexible control of a change-over
phase (transition-phase from standing on one leg to standing on
the other leg) using torque feedback. Consequently dynamic complete
walking was realized, the first successful such walking in the world
(1.3sec/step).
|
[Next] [Content Top]
Copyright by Humanoid Robotics Institute, Waseda University. All rights
reserved.
|