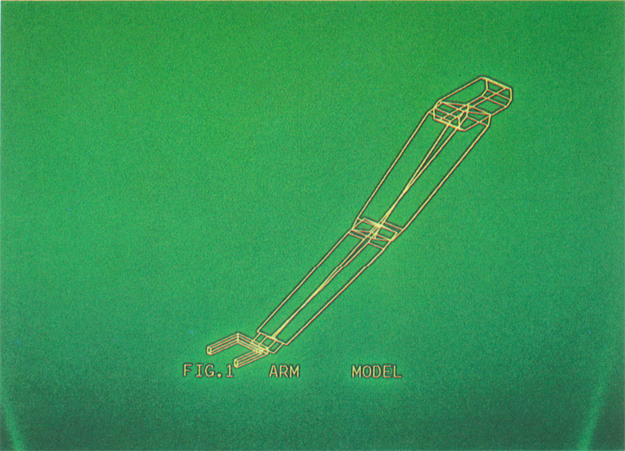
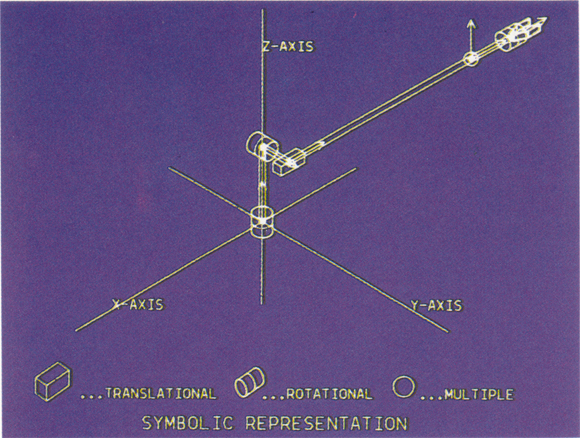
リンクモデル (1983)
任意の自由度を有するロボット機構の骨格定義を与えれば、そのモデル化および動力学方程式の自動生成・解析を対話的に行なえるソフトウェアシステムを開発した。なお、本システムは制御システムを有するリンク機構にも応用可能である。
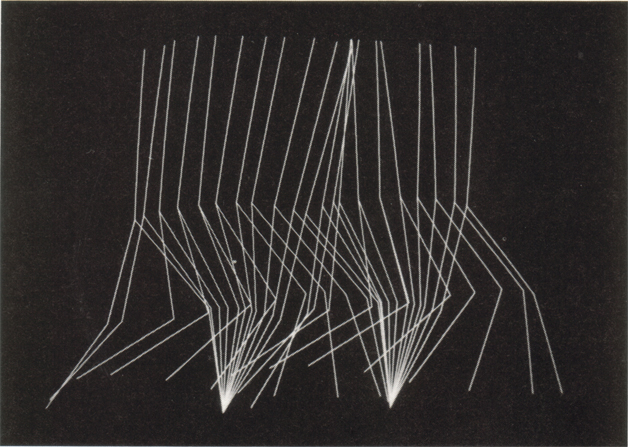
2足歩行ロボットの動歩行に対応可能な対話型歩行バターン作成・支援システム「WALKMASTER-2」をマイコン上に構築した。これは、マウスを用い、アクチュエータ特性を見込んだ歩行バターンの生成、視点可変な3次元グラフィック、ZMP解析を可能とする。
[Content Top]