|
 
人工の手
当研究室の人工の半開発は、3年前から始められていた義手の開発研究をもとに、昭和42年よりWAM(Waseda Automatic Manipulator)シリーズとして始まった。開発当初は、人工の手機構部に重点をおき、生産工程における人間の代行すなわち力作業におけるマニピュレーションを目的とした種々のセンサを有する人工の手を開発した。その後、コンピュータの発達にともない、力作業における人工の手の力制御および冗長自由度制御手法などソフトウェアの研究を進めた。現在では、単に力作業だけでなく、将来のロボットに必要になると考えられる情報処理作業をも行える多自由度人工の手の研究を行っている。
|

WAM-1(1967)
WAM-2
(1969)
|
|
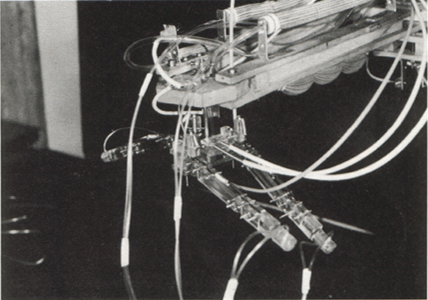
初期WAMシリーズ:WAM-1, 2, 3 (昭和42年〜45年)
当研究室で最初に開発されたのは、早大型ゴム人三筋(7貢参照)を用いた空気圧式のWAM-1である。これは、3本指4自由度、腕3自由度の7自由度から構成されていた。昭和44年には、コンピュータを用いて人工の手を制御する試みがなされ、電動式で腕に5自由度を有するWAM-2を開発、その翌年WAM-3を開発した。WAM-2,3は、位置センサおよび半導体感圧素子による圧力センサを指先に有しており、対象物をつかみ、移動し、はなすという一連の動作を自動的に行った。
|
|
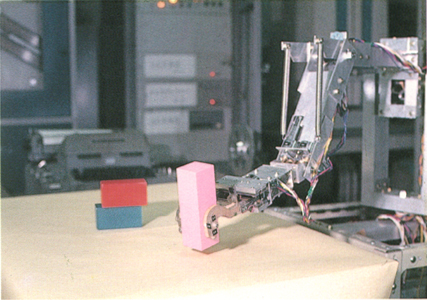
WAM-4
(1972)
|
|
WABOT-1への発展(昭和46年〜47年)
昭和46年からは、WAM-1, 2, 3の成果をもとに、胸部6自由度、指部5指1自由度からなる人工の手WAM一4の開発を始め、これは昭和47年に完成した。WAM-4は知能ロボットWABOT-1(5頁参照)の上肢サブシステムとして初めて両手が製作され、対称形バイラテラル制御による対象物の持ちかえ動作、視覚情報および指のタッチセンサ情報にもとづいて物体を探索、把握し、移動するといった作業を実現した。 |
|
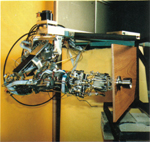
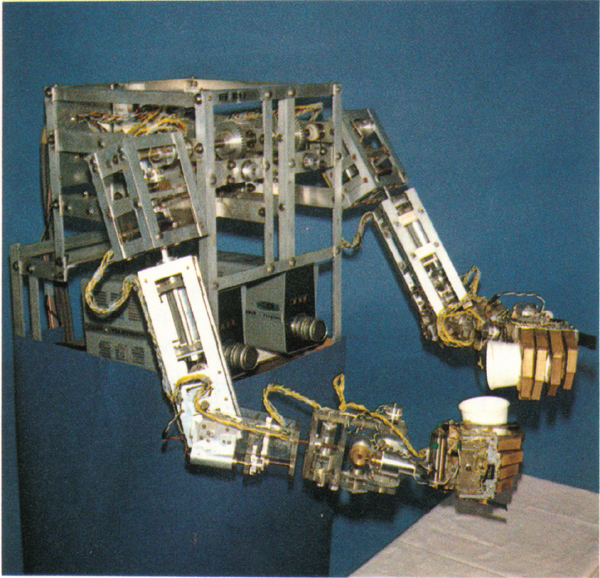
WAM-6 (1980)
|
|
九制御と冗長自由度(昭和48年〜55年)
昭和48年からは、冗長自由度をもつ人間形人工の手の九制御について研究を始め、昭和49年に外界からの拘束に適応可能な「トルク位置制御」概念を提案した。ハードウェ7開発は昭和50年から始められ、昭和54年に腕7自由度、指2自由度からなるWAM一6を構成した。WAM一6はRSA(Rotary
Servo Actuator)を用いた電気油圧サーボで制御され、各関節に貼付されたひずみゲージによりトルク検出が可能になっている。昭和55年に、手首部3自由度でのトルク制御と位置制御を複合した3次元トルク位置制御をWAM-6
に適用し、ドア開け作業、波板へのペンキ塗り作業を実現した。
|
|
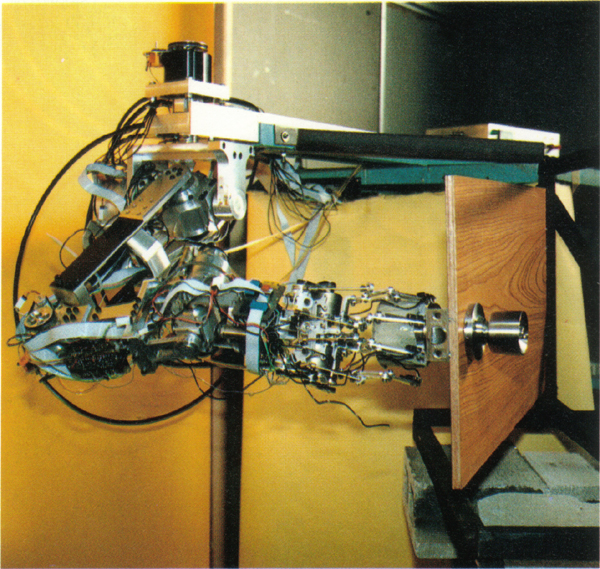
 WAM-7 (1983)
WAM-7 (1983)

WAM-8, WAM-7R
and WAM-8L (1984)
|
|
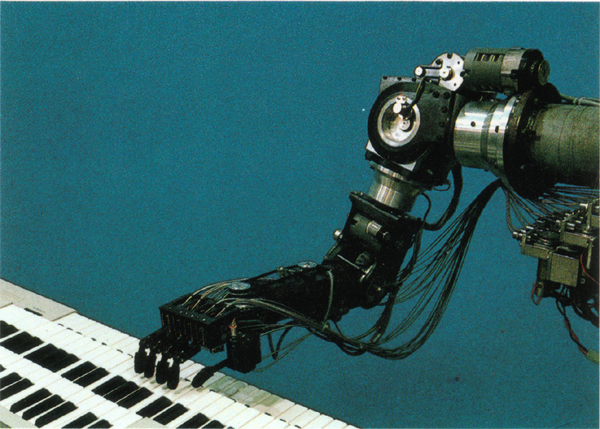
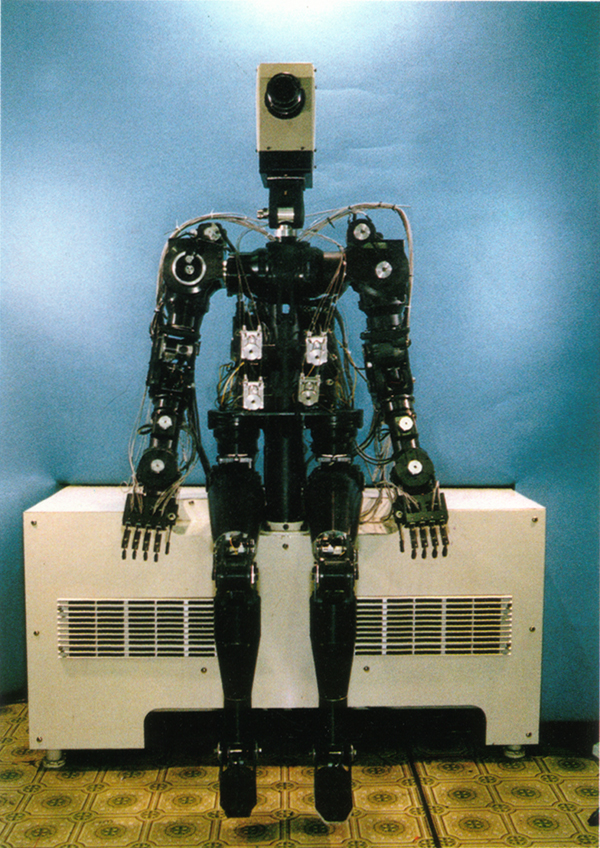
鍵盤楽器演奏ロボット(昭和56年〜平成元年)
昭和56年、ロボットの巧緻性、高速性、知的能力の向上を目指す新たな構想のもとに、作業対象として鍵盤楽器の演奏を設定し、ミュージシャンロボットの研究を開始した。昭和57年にワイヤによるモータ動力伝達方式で1秒間に10回の打鍵を実現し、昭和58年には腕7自由度、指14自由度からなるWAM-7により簡単な曲の演奏が可能になった。昭和59年、WAM-8(右)、8L(足)、7R(左)からなる計50自由度の4肢を構成、1秒間15回の打鍵を可能にし、さらに人工知能における探索の手法を用いて、指と腕との協調動作を自動的に決定する楽譜情報処理プログラムを開発することにより、電子オルガン中級程度の曲の演奏を実現した。
|
[Next] [Content
Top]
Copyright by Humanoid Robotics Institute, Waseda University. All rights
reserved.
|