|
 
Artificial Arms and Hands
The study of artificial arms and hands began in 1967 incorporating the technological assets gained from developing the active prostheses started three years before. The studies had at first aimed only to develop machines to perform manual labor in lieu of persons and emphasized development of artificial hand mechanisms. Recently the aim has been to develop robots which can perform intelligent work as well as manual labor.
|

WAM-1
(1967)
WAM-2
(1969)
|
|
First Stage WAM Series: WAM-1,
2, 3 (1967~1970)
WAM-1 was first developed in 1967, in which WASEDA-type artificial
muscles made of rubber (cf. page 7) were used. WAM-1 featured seven
degrees of freedom (DOF), four in the hand and three in the arm. In
1969, the computer-controlled WAM-2 was assembled featuring five electrically
actuated DOFs in the arm. The WAM-3, a further refinement of the WAM-2,
was developed in 1970. WAM-2 and 3 had the position sensors and the
pressure sensors on their fingers so that they could automatically
grasp and transport objects. |
|
WAM-4
(1972)
|
|
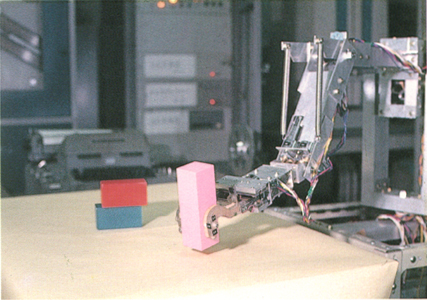
Expansion to the WABOT-1 (1971~1972)
The development of the WAM-4 was started on the basis of the previously
developed models, the WAM-1, 2 and 3, and was completed in 1972. The
WAM-4 consisted of six DOFs in the arm and one DOF in the hand. The
right and left hands were both developed as the upper limbs of the
intelligent robot WABOT-1 (cf. page 5). WAM-4 detected objects using
a visual sensor and tactile sensors attached to its fingers, and grasped
and transferred or shifted objects from one hand to the other using
symmetric bilateral contro1. |
|
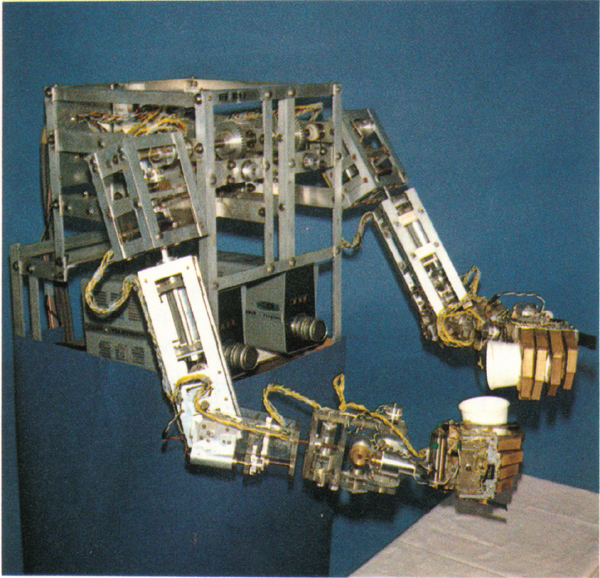
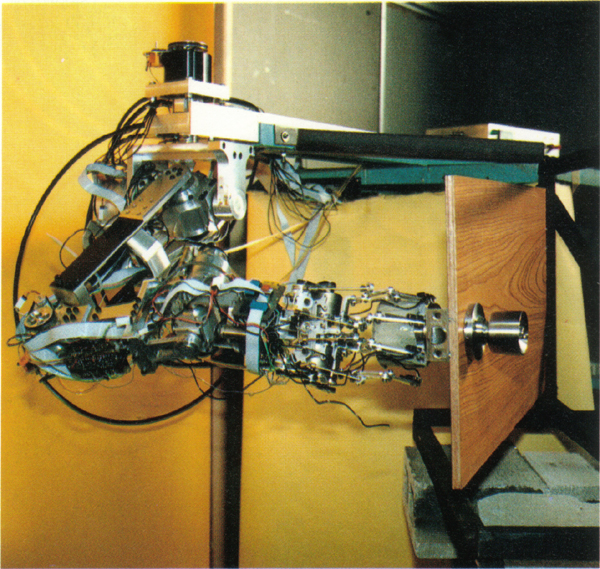
WAM-6 (1980)
|
|
Force Control and
a Redundant DOF (1973~1980)
Studies of an anthropomorphic artificial arm having a redundant
DOF 1ike a human arm were started in 1973. In 1974, one concept
for control adaptable to external constraints, named the "Torque
Position Contro1", was proposed. The development of the WAM-6, which
had seven DOFs in the arm and two DOFs in the hand, was started
in 1975 and completed in 1979. Electro-hydraulic servo-actuators,
RSA (Rotary Servo Actuator) were introduced and torque feedback
was managed by the strain gauges attached to each joint of the WAM-6.
In 1980, three-dimensional Torque-Position Control was applied to
the WAM-6, making it possible to open a door and paint a curved
surface.
|
|
 WAM-7 (1983)
WAM-7 (1983)

WAM-8, WAM-7R
and WAM-8L (1984)
|
|
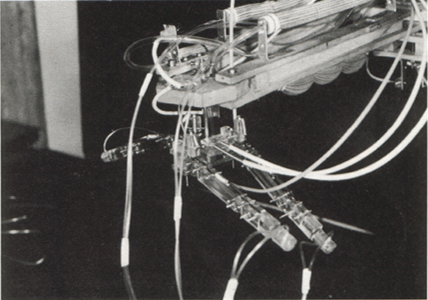
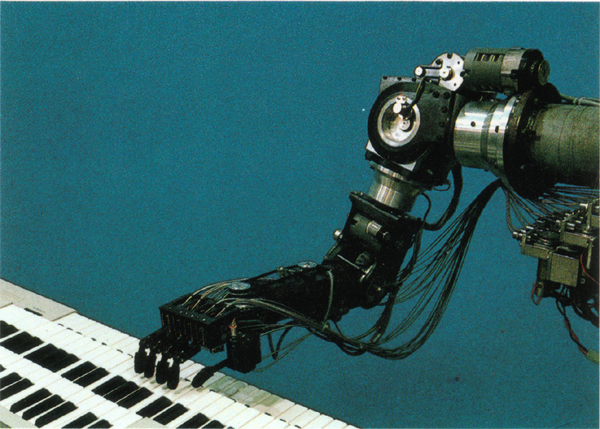
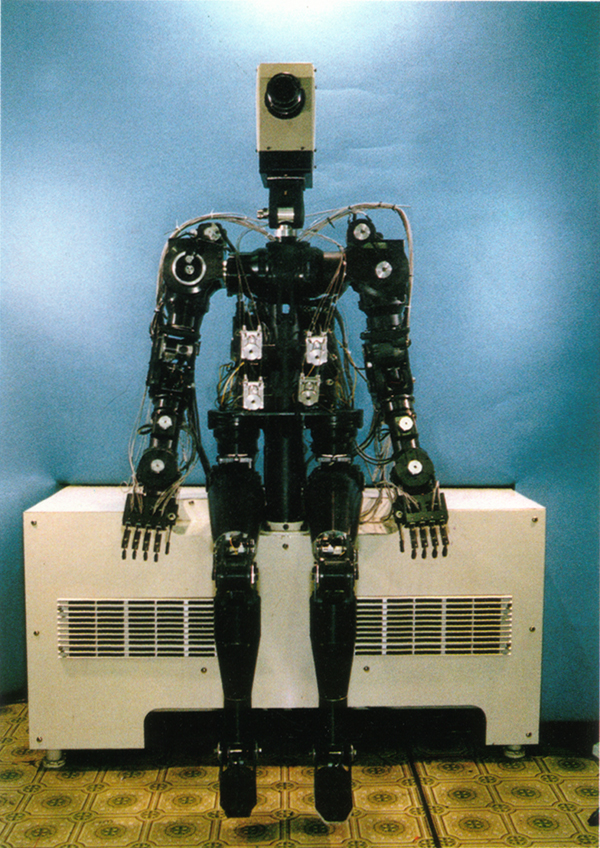
Keyboard Playing
Robot (1981~1989)
The task of developing a dexterous robot that could move quickly
and act intelligently began with the challenge of trying to construct
a robot that could play a keyboard. In 1982, tapping a key in ten
times per second was realized by artificial fingers to which the
driving force was transmitted through cables. In 1983,the WAM-7
with seven DOFs in the arm and fourteen DOFs in the fingers was
developed and it could play simple tunes. Four limbs, the WAM-7R
(left arm), the WAM-8 (right arm), the WAM-8L (legs) were successively
developed in 1984. They had fifty DOFs total and played the electronic
organ, tapping fifteen times per second. The software algorithm
based on artificial intelligence software that could read a musical
score automatic any determined the cooperative movement of the fingers
and arms. The WAM-8 had the ability to perform middle-level tunes.
|
[Next] [Content Top]
Copyright by Humanoid Robotics Institute, Waseda University. All rights
reserved.
|