| |
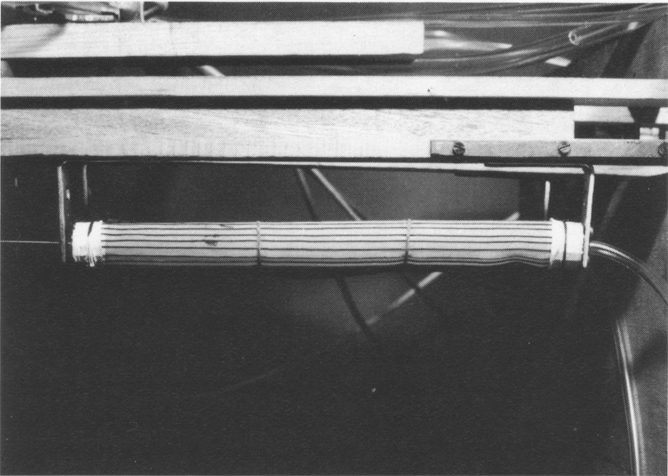
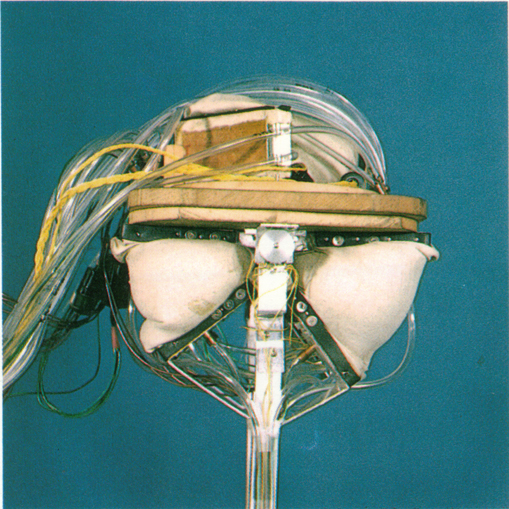
Artificial Muscle and Human Postural Stability This study aimed to develop an artificial muscle which could be applied to artificial limbs. The technological fruits of this study were transferred to the studies of biped walking robots (WAP series) and above knee prostheses.
[Next] [Content Top] Copyright by Humanoid Robotics Institute, Waseda University. All rights reserved.
|
||||||||||||
| |