| |
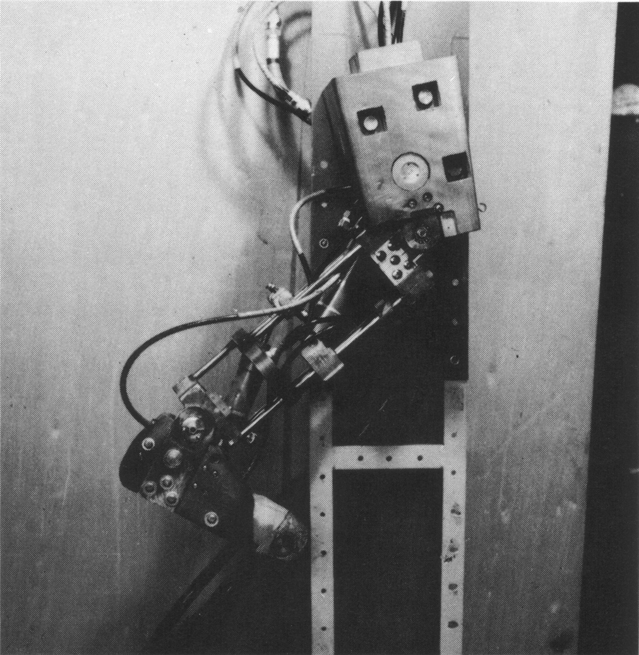
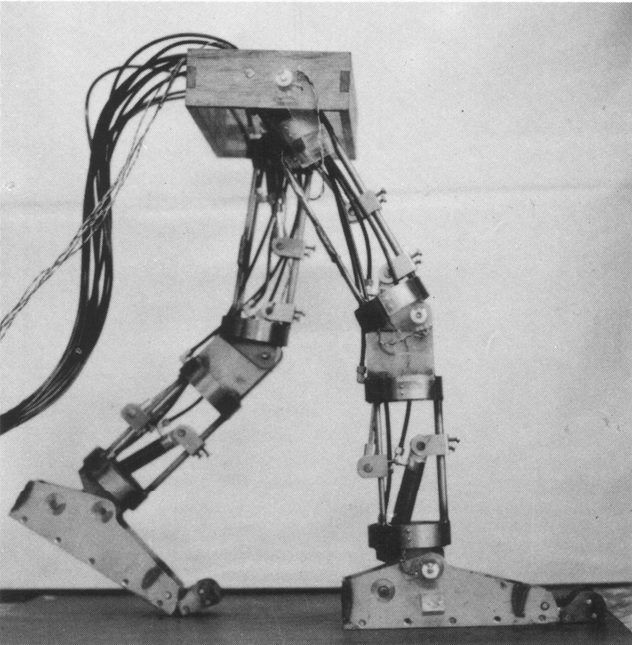
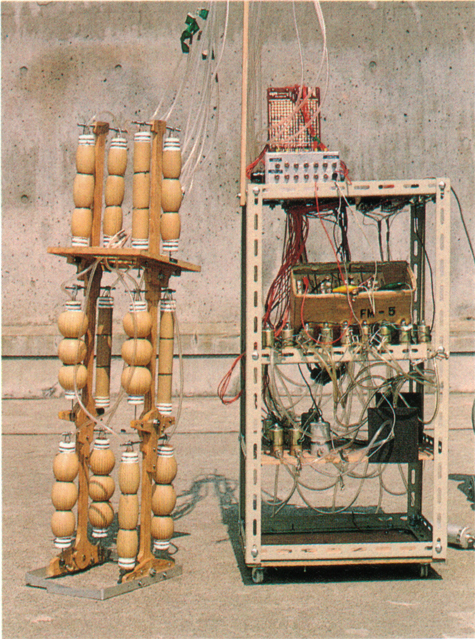
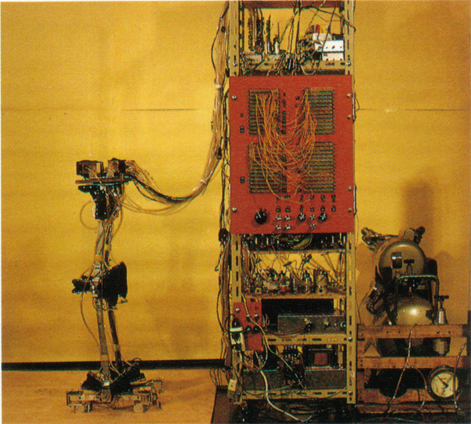
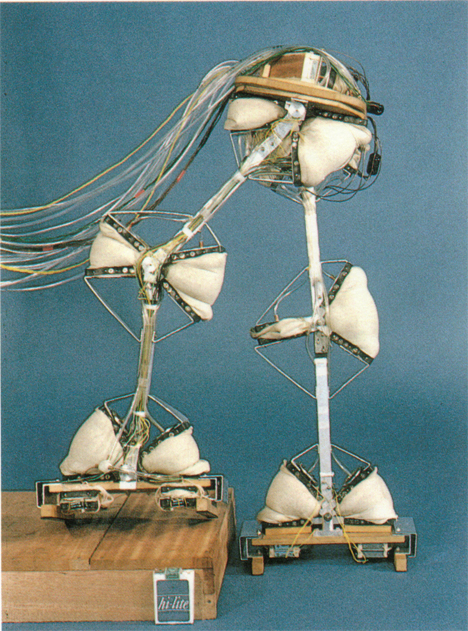
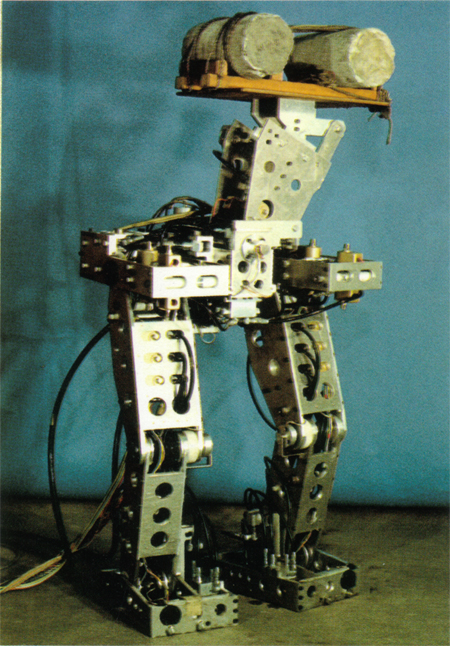
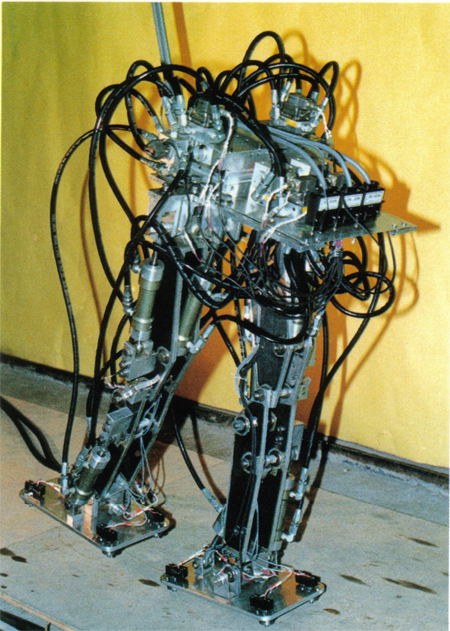
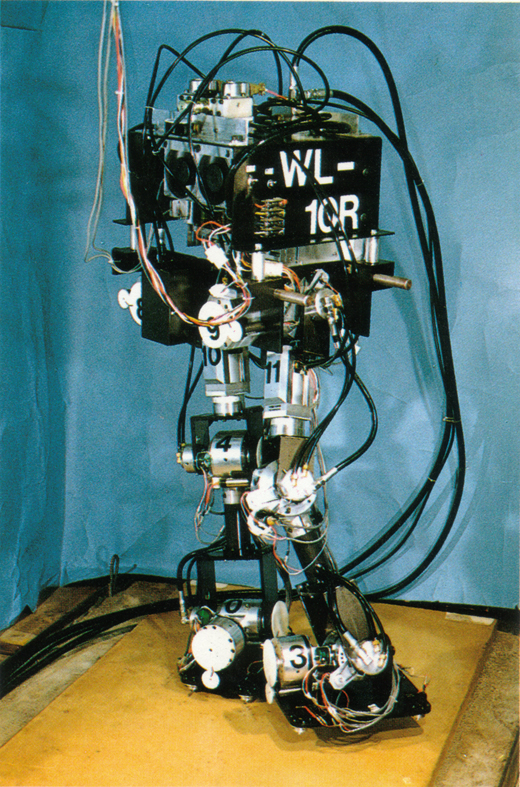
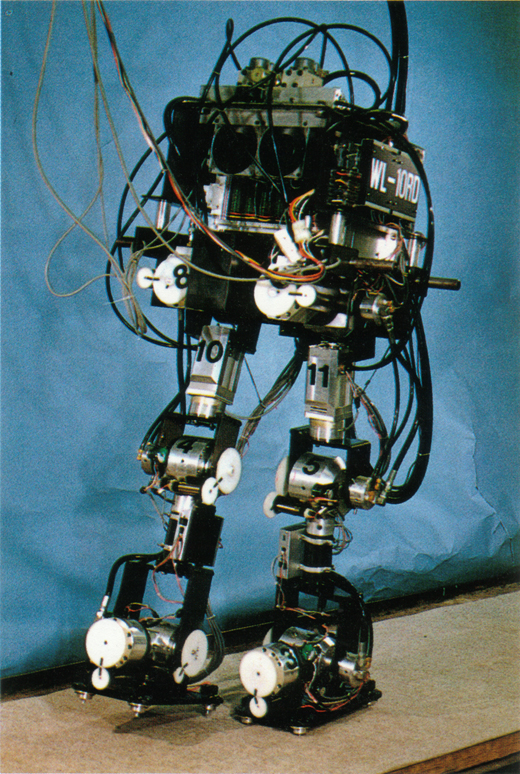
2足歩行ロボット 当研究室における2足歩行ロボットの研究は昭和41年から開始された。2足歩行を機械モデルにより実現することで、人間の歩行メカニズムを工学的視点から解明することを目的としている。機械モデルとして重量モデルを用いたWL(Waseda Leg)シリーズと軽量モデルのWAP(Waseda Automatic Pedipulator)シリーズの2つの流れがある。前者は駆動源に油圧を用い、後者は空気圧を使用しゴム人工筋を駆動している。
[Next] [Content Top] Copyright by Humanoid Robotics Institute, Waseda University. All rights reserved.
|
||||||||||||||||||||||||||||||||||||
| |