|
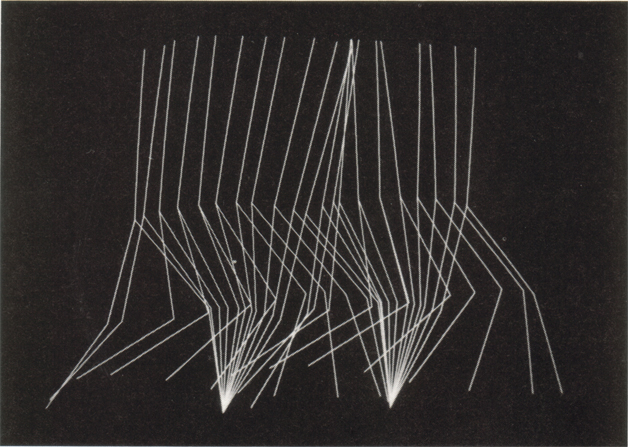
 Three dimensional
graphics of a walking robot by WALK MASTER-2 (1984)
Three dimensional
graphics of a walking robot by WALK MASTER-2 (1984)
 Trajectory of
ZMP and projected center of gravity (1984)
Trajectory of
ZMP and projected center of gravity (1984) |
|
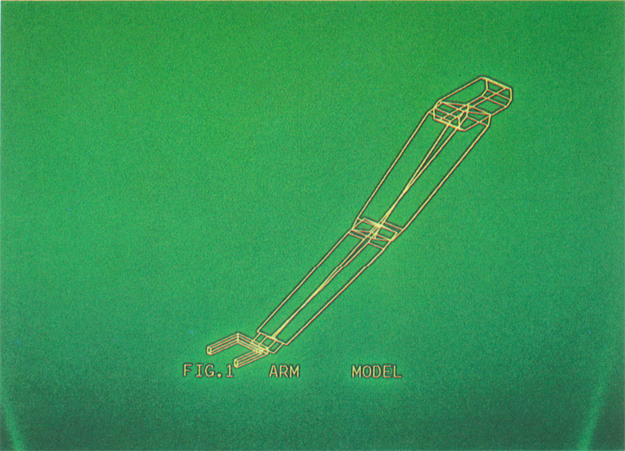
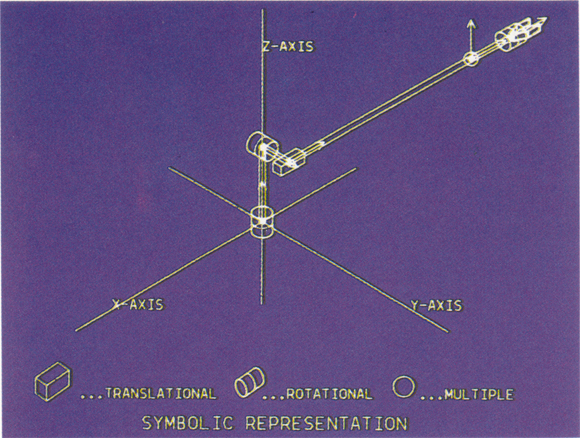
Computer-Aided
Composition System for Walking Pattern: WALK MASTER-2 (1984)
The interactive software-system WALK MASTER-2 was written for a
personal computer to analyze and compose the walking pattern of
a biped walking robot. This system enables the analysis of the ZMP
(zero moment point) when the biped robot is walking, and the composition
of a walking pattern combined with the robot's actuator's characteristics
on three-dimensional graphics.
|