|
 
WABOT -WAseda roBOT-
21世紀に入るとロボットは現在の主な活躍場所である第2次産業だけでなく、いわゆるサービス産業である第3次産業へその活躍の場を広げると考えられる。この場合、ロボットにはより人間的な機能、姿態が求められる。すなわち、産業用ロボットが人間の力仕事を代行するものとすれば、このロボットは力作業だけでなく、人間のように情報の処理もするという2面性をもたなければならない。このように限りなく人間に近づくロボット「マイ・ロボット」を最終目標として計画されたのが、人間形知能ロボットWABOTである。
WABOT計画は、:早稲田大学理工学部の4つの研究室からなる生物工学研究グループにより、昭和45年に始められ、これまでに2号機まで完成している。当研究室は、人工の手足とそのコントロールシステムからなる運動系システムを担当している。
|
WABOT-1
(1973)
|
|
WABOT-1 (昭和45年~48年)
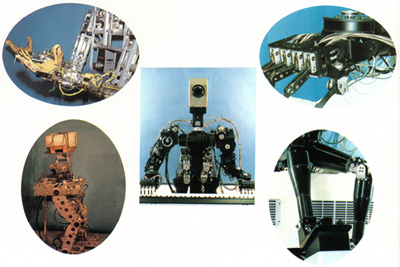
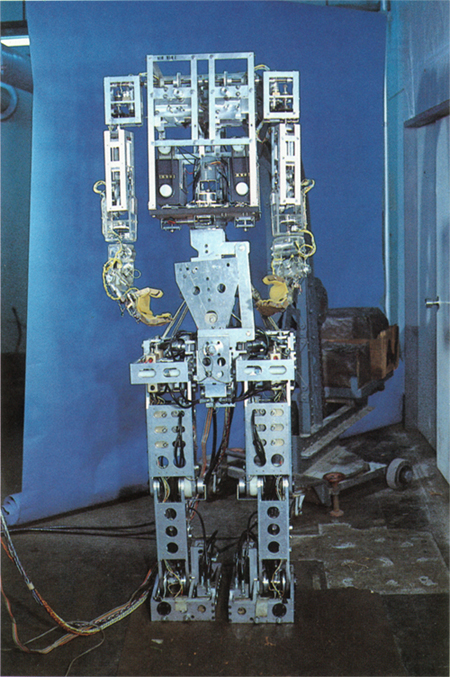
WABOT-lは昭和48年に完成した世界初の本格的人間形知能ロボットであり、手足システム、視覚システム、音声システムから構成されている。機能としては、人工の口により人間とのコミュニケーションを簡単な日木語の会話で行い、遠隔受容器としての人工の耳・目により対称物を認識し距離・方向を測定し、2足歩行によって移動し、触覚を有する両手で物体の把握・移動などの作業を行うことが可能である。これは人間にたとえると1才半程度の幼児の能力に匹敵する。なお、人間の手にはWAM-4、人工の足にはWL-5が使用されている。 |
|
 WABOT-2 (1984)
WABOT-2 (1984)
|
|
WABOT-2 (昭和55年~59年)
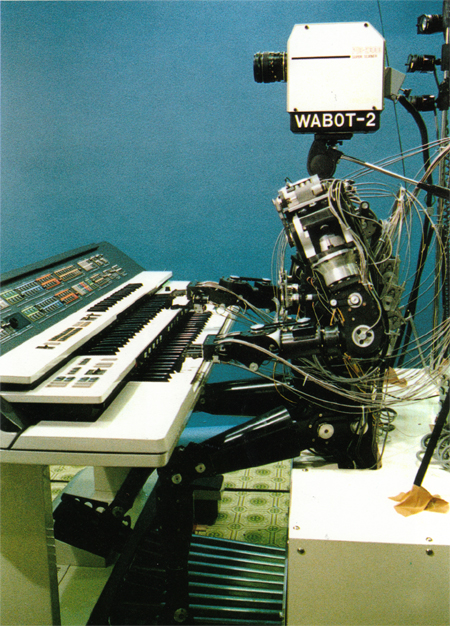
昭55年、4研究室は研究グループとして再集合し、客研究室がWABOT-1以後蓄積してきた研究を総合するプロジェクトWABOT-2の目標設定を開始した。WABOT-2はWABOT-1のような汎用型ロボットではなく、人間の知的日常作業の中で巧みさが求められる芸術活動にまとを絞り、それを実現するいわばスペシャリストロボットとして目標を鍵盤楽器演奏に絞り込んだ。ミュージシャンロホットWABOT-2は、人間と日本語で自然な会話を行い、楽譜を目で認識し、両手両足で電子オルガンを演奏するという機能をもち、能力としては中級程度の曲の演奏が可能である。さらに、人間の歌声を認識し、自動採譜を行い、これをもとに人間の歌声に合わせて伴奏することができる。これは、ロボットが人間に合わせる能力をもったことを意味し、マイ・ロボットヘ大きく1歩近づいた。
|
[Next] [Content
Top]
Copyright by Humanoid Robotics Institute, Waseda University. All rights
reserved.
|